Na uitlijning van de totale opstelling staat de sensor met zijn middelpunt O op de optische as van de testspiegel. Dit punt wordt gedefinieerd als nul. Posities rechts hiervan (gezien vanuit de testspiegel naar de sensor) worden positief gerekend, links daarvan negatief.
Als de spiegel een perfecte parabool is, en de sensor in het brandpunt van de spiegel staat, zal de laserreflectie samenvallen met punt F. Tijdens de volledige scan van de diagonaal over de testspiegel is er geen enkele afwijking van dit punt. Als we een grafiek tekenen van de afwijking x i.f.v. de positie P van de laser zal het resultaat een rechte zijn die samenvalt met de absis.
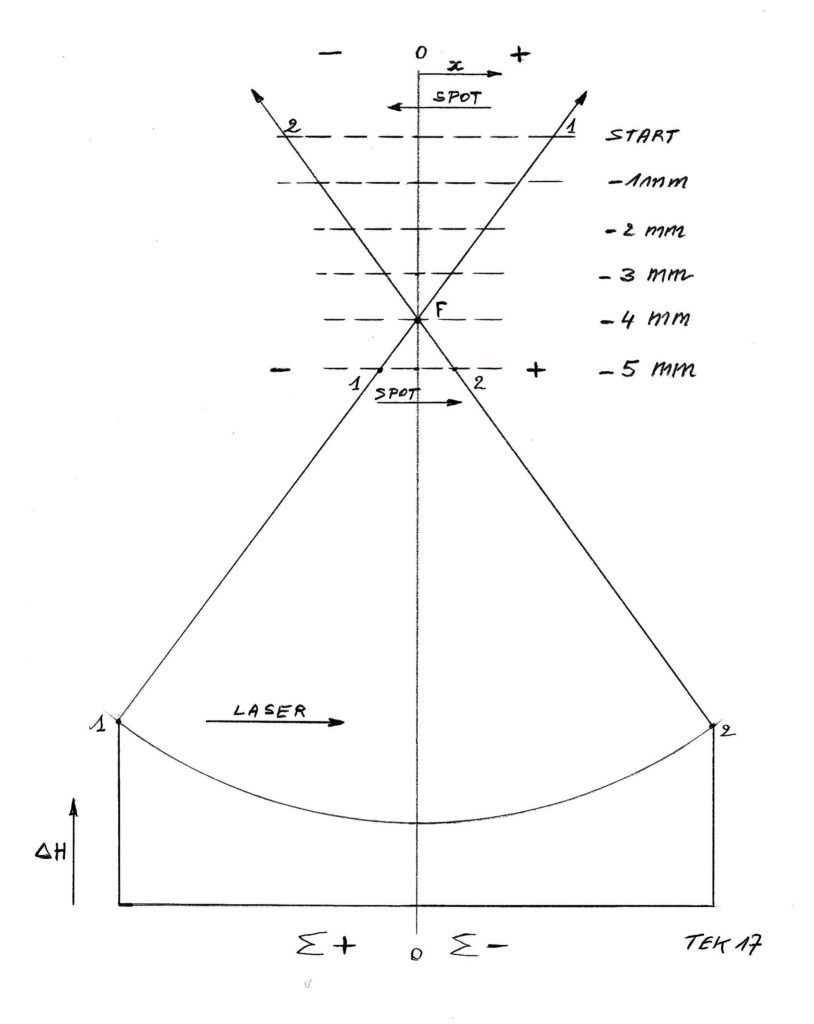
De laser start links van de optisch as O (punt 1 op Tek 17 hierboven) en loopt over een spiegeldiagonaal naar rechts naar punt 2.De sensor staat met zijn middelpunt op de optisch as. Alleen de gereflecteerde stralen zijn getekend. Bij de start links is dat lijn 1-1; op het einde van de scan is dat lijn 2-2.
Bij aanvang van de test staat de sensor (stippellijn) in positie “Start”. Dat is een heel eind verder van de testspiegel dan het brandpunt F. Hierdoor loopt de spot van rechts naar links over de sensor (van nummer 1 naar nummer 2). Hierdoor heeft x in aanvang een hoge positieve waarde, evolueert over nul naar een hoge negatieve waarde (zie grafiek hieronder x 20171108 lijn 9h heen start)
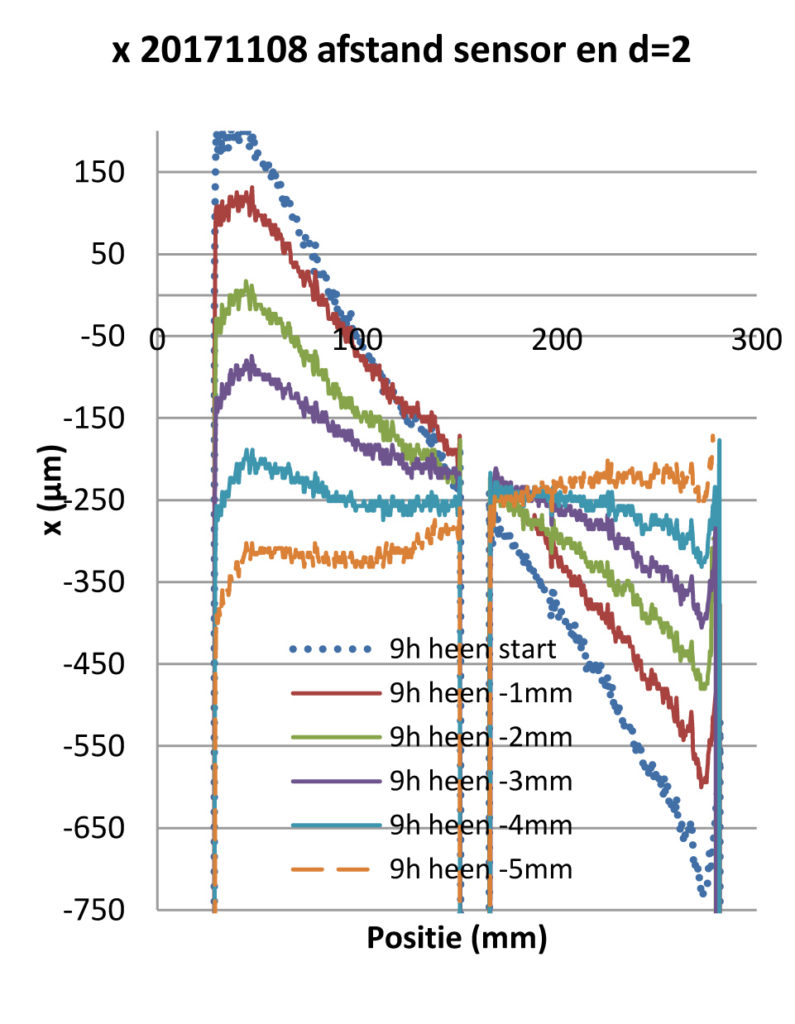
De sensor is dan vijf maal een mm dichter naar de spiegel gezet en telkens gemeten. De helling van de curven neemt af, tot bij -5mm de curve omgekeerd is, x loopt nu van negatief over nul naar positief. De meest horizontale curve ligt bij -4mm. Hier staat de sensor juist in het brandpunt. Het brandpunt ligt dus 4mm dichter bij de spiegel dan bij de startmeting.
In de praktijk kan met de aandrijving van de laserkar losmaken van de stappenmotor, en de laserkar met de hand snel over en weer schuiven voor de testspiegel. Door op de pc de horizontale beweging van de spot te bekijken krijgt men snel een inzicht of de sensor al of niet in het brandpunt staat. Zolang de spot nog duidelijk beweegt is dat niet het geval. Door nu de sensor voor- of achteruit te bewegen kan men een positie vinden met weinig of geen horizontale spotbeweging. Op dat moment staat de sensor in het brandpunt.